Аннотация: Вероятность достижения цели зависит от того, каким образом задача разбита на этапы, и в каком порядке эти этапы реализуются. Статья посвящена анализу оптимального выбора последовательности шагов к цели.
Введение
В классической теории вероятностей условия задачи фиксированы, и вероятность события определяется один раз. В предпринимательской практике всё иначе: задачи многократно уточняются, этапы планов меняются местами, пересматриваются сроки и ресурсы. При этом сама вероятность достижения целей меняется вместе с последовательностью действий.
Лемма. Вероятность достижения цели зависит от того, каким образом задача разбита на этапы и в каком порядке эти этапы реализуются.
Иллюстрация-пример для доказательства "от противного" (транспортная задача).
Пусть требуется добраться из А в В через Б - стартуя в 9:20. АБ=БВ (расстояния измеряются по прямой, передвижения происходят по ней же - для простоты).
Машина(маршрутка): отправление каждые 1 ч. 25 мин. (начиная с 9:00), время в пути между двумя соседними пунктами 10 ч. 10 мин.
Самолёт: отправление каждые 45 мин. (начиная с 9:00), время в пути между двумя соседними пунктами 50 мин.
Цель: прибыть до 21:55.
Вариант 1. Машина → Самолёт. Прибытие в 21:50, успех (вероятность = 1).
Вариант 2. Самолёт → Машина. Прибытие в 22:00, неуспех (вероятность = 0).
Вывод: порядок этапов напрямую влияет на вероятность успеха.
Формализация.
Пусть проект состоит из этапов i=1,...,n.
Каждый этап характеризуется длительностью ti и условной вероятностью pi.
Общая вероятность тогда:
Psucc=∏(по i=1 до n)pi,
log(Psucc)=∑(по i=1 до n)log(pi).
Дискретный случай.
Оптимальное упорядочивание этапов (при ограничении по времени ∑ti(C) = < T):
cортировать по убыванию (Δlog(pi))/ti.
Это аналог правила Смита (WSPT) в теории расписаний.
Правило выбора: в каждый момент времени выполнять действие, максимизирующее
g(u,t)−h(u,t).
Таким образом, оптимальная стратегия выдвигает вперёд действия, которые:
- дают максимальный прирост вероятности успеха на единицу времени;
- уменьшают риски последующих провалов;
- увеличивают вероятность успеха следующих шагов.
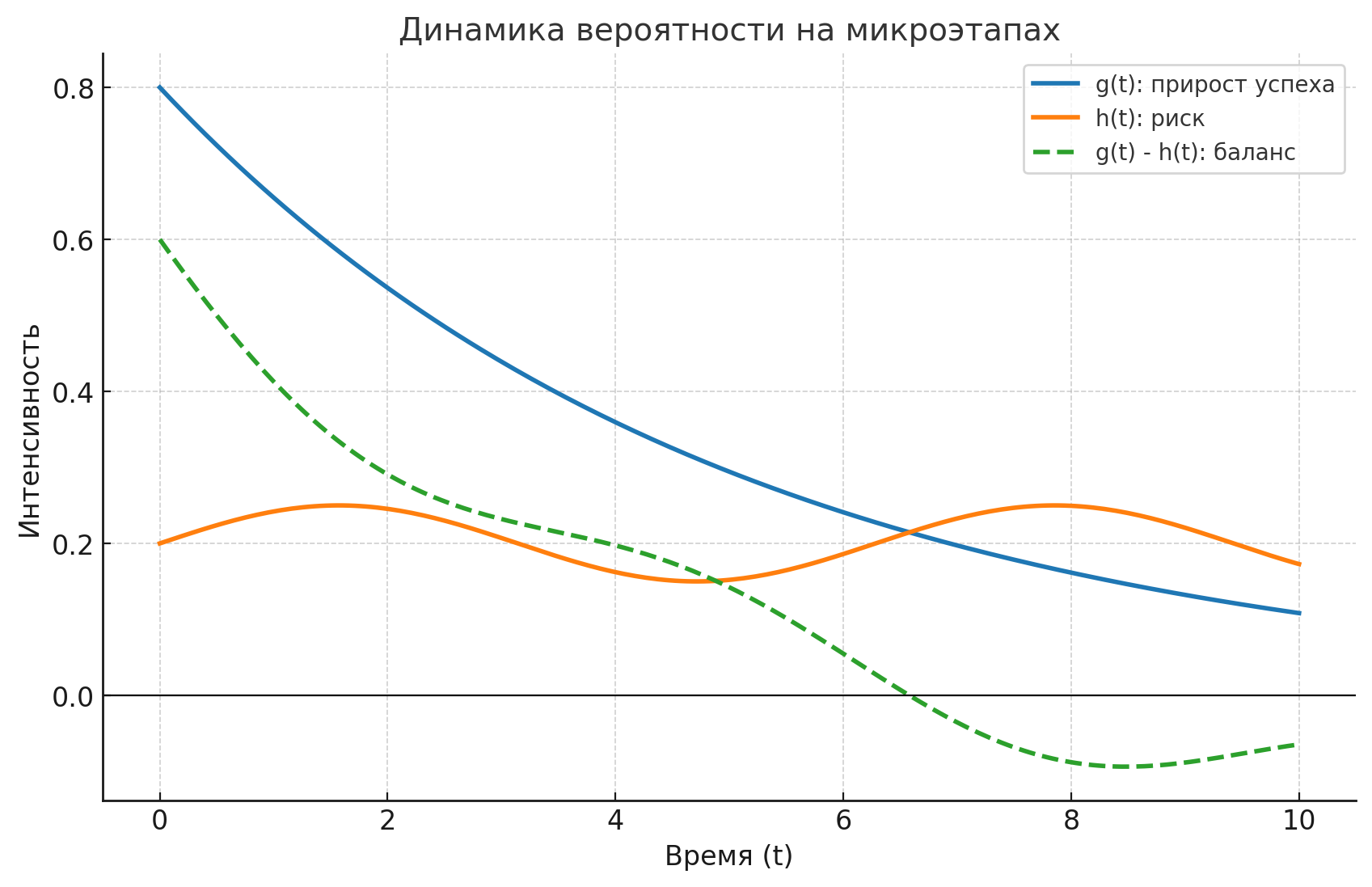
Графики: на рисунке видно, как 'прирост успеха' g(t) со временем снижается, риск h(t) колеблется, а баланс g(t)−h(t) показывает зоны, где выгодно предпринимать шаги (выше нуля) и где они уже становятся рискованными (ниже нуля).
Практические выводы:
- этапы с высокой вероятностью успеха или с "разблокирующим" эффектом должны выполняться первыми;
- чем мельче разбиение на этапы, тем гибче управление вероятностями.
Порядок должен пересматриваться динамически при изменении условий.
Подход согласуется с теориями управления проектами, планированием операций и survival-анализом.
Заключение.
Поэтапное решение задач предпринимателя - это инструмент управления вероятностями. В пределе бесконечно малых этапов возникает простое правило: в каждый момент времени выбирать действие, максимизирующее прирост успеха и минимизирующее риск.
Главная рекомендация:
В начале пути ставьте шаги, которые либо имеют наибольшую вероятность успеха, либо усиливают шансы последующих этапов.
Литература
1) Smith, W.E. (1956). Various optimizers for single-stage production. Naval Research Logistics Quarterly, 3(1), 59-66.
2) Pinedo, M. (2016). Scheduling: Theory, Algorithms, and Systems. Springer.
3) Cox, D.R. (1972). Regression models and life tables. Journal of the Royal Statistical Society: Series B (Methodological), 34(2), 187-220.
4) Klein, J.P., & Moeschberger, M.L. (2003). Survival Analysis: Techniques for Censored and Truncated Data. Springer.
5) Branke, J., & Schmidt, C. (2003). On the influence of uncertainty on scheduling problems. Journal of Scheduling, 6(3), 273-289.
6) Gittins, J.C. (1979). Bandit processes and dynamic allocation indices. Journal of the Royal Statistical Society. Series B (Methodological), 41(2), 148-177.