
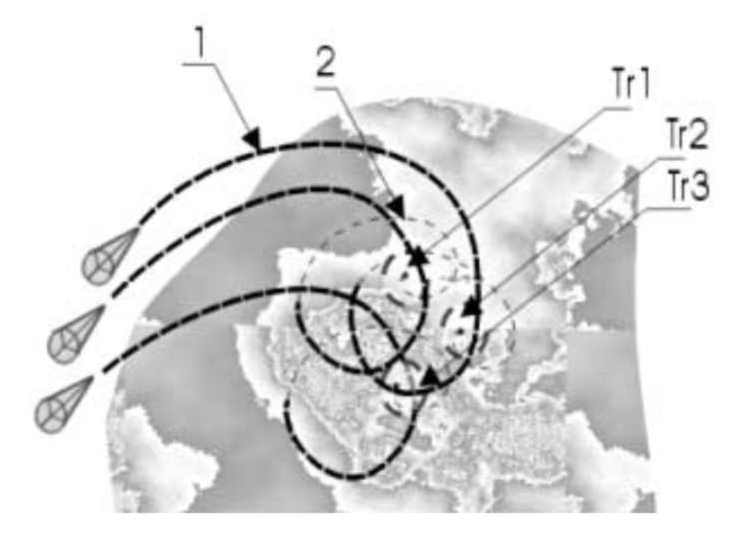
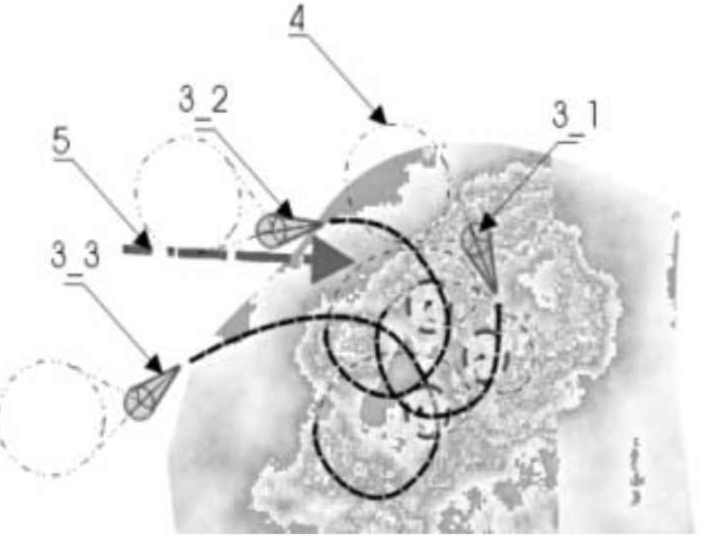
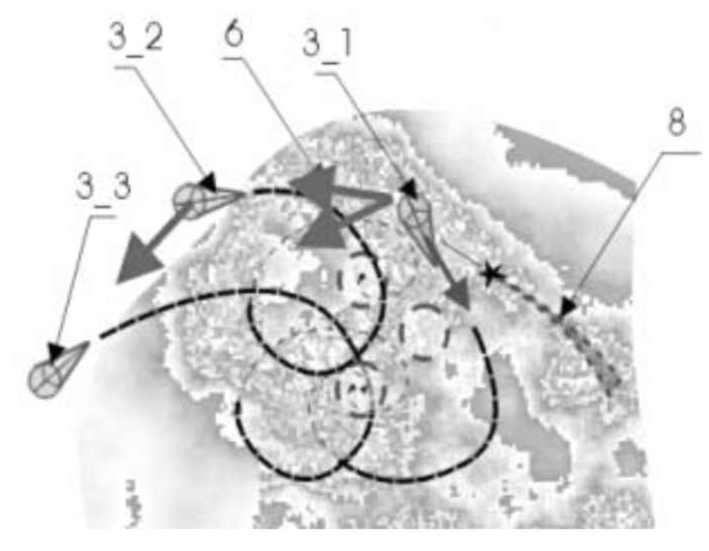


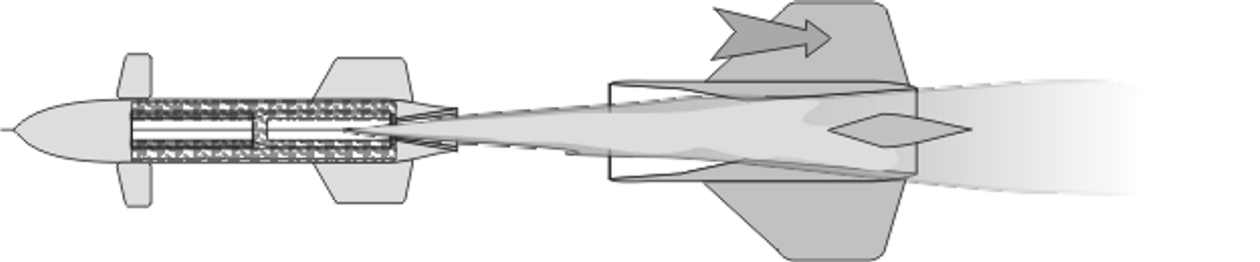

Выбирая необходимый курсовой угол, боеголовка создает на своей нижней поверхности несимметричную вихревую зону.
Изменение положения оси боеголовки относительно оси движения, изменение взаимных положений центра тяжести и центра давления или поперечный наклон корпуса относительно плоскости движения вызывают боковое скольжение и изменение направление движения.